Forces and Acceleration
| Tags | Dynamics |
|---|
Development of forces
Jacobians can actually tells us the relationship between forces at the end-effector and the torques at the joints. But we will show this slowly. First, let’s talk about forces. The moment, or the torque is defined as the cross product
where is the radius and is the applied force.
Summing moments
Much like angular velocities, moments are vectors that are agnostic to position. In other words, you can have torque being applied to different points, but you can add these points together to get the total moment.
Force Propagation
Force propagation is similar to position or velocity propagation because you’re essentially starting with what you know, and you end up deriving the torques sequentially. However, (and this is pretty neat because of duality), instead of the base, you start at the end-effector. This is because you know the forces on the end-effector, and you know that they have to be balanced. More on this in a second.
Single Link
Right now, we care about static forces, which are forces that occur when the robot is standing still. Now, for this to happen, the sum of forces and moments must be both zero.
Let’s focus on a single link
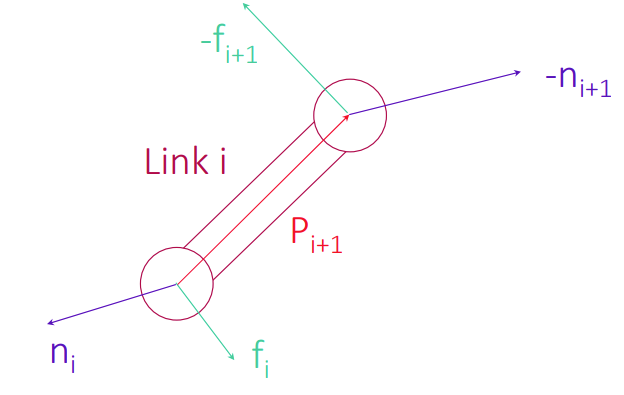
You compute the moment and the force at each joint. From this, you get two critical equalities
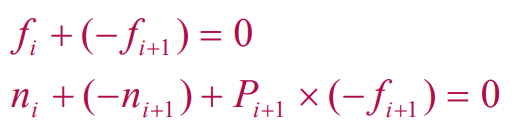
The first equality comes from force, and the second equality comes from the definition of moments.
Propagating the forces
You start at the very end of the EEF and figure out what force it’s trying to exert. Then, you can get the equal and opposite force that is being exerted on the arm. This is the force you start with (denoted as on the arm).
Good rule of thumb: the end of the link has some force that is being exerted on it, denoted as . This is directly from the next joint’s and it not subject to chnage (newton’s third law). From this you derive your next force and torque.
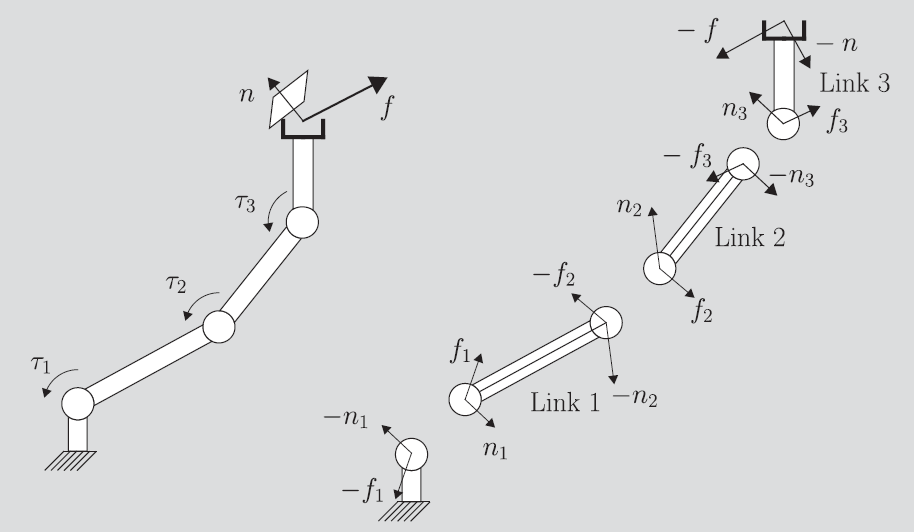
Intuitively, if you imagine supergluing the joints and not caring about the joint torques or forces, this robot is just an elaborate stick. This stick will transmit force directly. If you are in static land, the robot should act like a stick to the outside observer. Now, to maintain this stick-like rigidity, you need to apply certain torques on the joints.
The torques are not just equal and opposite because the forces exert additional torques on the joints, so those have to be factored in.
Finding the actual joint forces / torques
But here’s the interesting question: there’s a lot of forces going through the robot, but only some forces matter. The forces that matter are the ones that exert an explicit torque on the robot joints or an explicit force on the prismatic joints.
For this, we just need to project the exerted force or torque onto the axis of the robot. For a prismatic joint, we have
and for a revolute joint, we have
Virtual Work
So the whole thing we described above with force propagation and then projection is actually kinda annoying. We can’t see anything elegant about it. But what if we use an energy argument? More specifically, there should be no net work done on the robot arm if we are stationary. This equation is
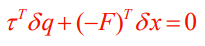
And because we know that , we get
which gives us the relationship
And therefore,
Unpacking this relationship
This is something that you get for as well as . You can compute this independently. Let’s consider the for a second. It allows you to represent each joint torque as a function
Each component is the force that the robot can apply. There can be vectors of in the nullspace of , which means that there is no value of that yields this . Simply put, this force is impossible for the robot to apply.
This can be a bit confusing, because actually yields the zero vector if is in the nullspace. To help with this interpretation, imagine that the robot is reacting to an applied force. Because this force is impossible to exert, it means that all the force is going through the structure. So the robot wouldn’t need any torque or force to support this applied force.
So how does this jive with the first interpretation? Well, remember that every force has an equal and opposite reaction. So when the robot is trying to apply force, it must also react to the force that it’s applying. A robot can apply a force if it can react to the opposite force with an with no components in the nullspace of . If there are any components in the nullspace, then the robot can’t exert that force; it can only support it.
Another thing to note: support means that the force is being directly applied to the robot. This is actually , because it’s external. Applying force is .