Jordan Form
| Tags | Math 104Math 113 |
|---|
The motivation
Previously, we used SVD to generalize eigenbases for non-square matrices. Now, we want to look at something different. If we had a square, defective (non-diagonalizable) matrix, can we make it as diagonal as possible?
Defining "as diagonal as possible"
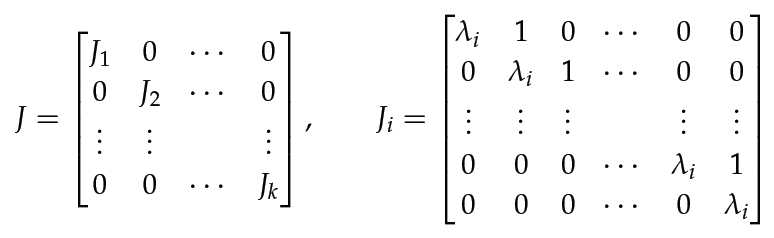
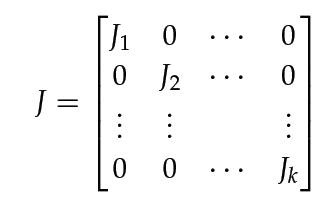
To do this, we will show that we can express any matrix where is a generalized eigenbasis for and where is in jordan Normal Form:
Generalized Eigenvectors
Increasing null spaces
Intuitively, the null spaces will grow. It makes sense because anything crushed to zero stays at zero, and elements in the range of may be in the null space of
Interestingly, if there is some such that , then all the null spaces from onward has the same size. You can prove this pretty easily by trying to show that (the other way around is by definition).
And intuitively, null spaces stop growing. More precisely, when the exponent is equal to , we are guarenteed to stop growing.
Generalized eigenvectors
In normal eigenvectors, sends eigenvectors to zero. generalized eigenvectors are such that there exists some such that for a generalized eigenvector , . We denote this generalized eigenspace as .
Of course, the normal eigenvectors are contained within the notion of generalized eigenvectors
We can define .
- forward direction: if , then because null spaces keep growing, it certainly is in the exponent .
- Backward direction: by the definition of , we can set , so anything in the null space of become part of .
Nilpotent Operators
A nilpotent operator (we've gone through this before) if some power of it equals zero.
If is nilpotent, then . This is because null spaces stop growing at the exponent, and nilpotent is defined to become zero at one point. As such, it must become zero before then.
Nilpotent operators have a basis such that the matrix is strictly upper-triangular, meaning that the diagonals are zero.
Jordan Form
A jordan chain of length is a sequence of non-zero vectors such that and .
If has at most linearly independent eigenvectors, a Jordan basis for is just the union of Jordan chains, each Jordan chain coming from a right eigenvector. You can imagine these eigenvectors being the base case, and the chain expanding from that.
The number of Jordan chains is the geometric multiplicity of .
Finding Jordan Chains
To do so, you start with the eigenvectors of , and then you set and solve for . And you keep on doing this until you have no more solutions. Then, you move onto and continue.
Connecting back to the Jordan block
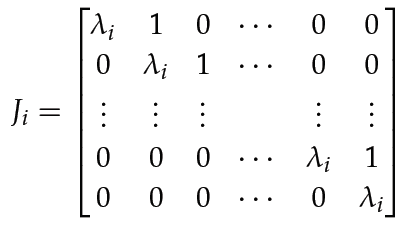
Each is a nilpotent operator. To be precise, it has a diagonal of zeros, and it maps to and to . As such, you can imagine each "block" of the Jordan matrix as corresponding to one of the generalized eigenvectors .
Each Jordan chain form the series of vectors that map down to the zero vector, so each Jordan chain corresponds to some . Putting multiple Jordan chains together in a diagonal fashion produces the Jordan block matrix representation A
More about Jordan chains
Recall that we are only concerned with in some Jordan Basis that creates the Jordan Normal Form.
Jordan chains of length have jordan block matrices of . The most degenerate Jordan chain would be an eigenvector. As such, if is diagonalizable, then the Jordan Basis is just the eigenbasis and the normal form contains degenerate "block" matrices that are just individual numbers down the diagonal.
On the other side of things, you can have a Jordan chain be the length of the basis itself. As such, if is , then the Jordan "block" would also be .