GAN
| Tags | CS 236 |
|---|
Moving from VAE, Flow
In MLE, variational autoencoders, and normalizing flow models, ultimately the objectives are based on minimizing KL divergence
This is a distance metric that decomposes into the log-likelihood. In MLE, we could compute it directly. In VAE, we used a special approximator. In Normalizing flow, we computed it through an invertible function.
Problems with maximum likelihood
In our previous approaches, we had some issues with computing likelihoods using the KL divergence. Furthermore, there are problems associated with maximum likleihood (i.e. KL divergence matrix).
If you have high likelihood, you can actually have a really bad model. By the log-construction, a sample that is noise 99% of the time and perfect 1% of the time will yield the highest score minus a (potentially) small constant.
Conversely, if you have good quality outputs, you can have low likelihood on the test set. A canonical example is an overfit model that memorizes the training set.
These counterexamples are yet another reason why we may want to shift away from the MLE objective; it seems to be a weaker objective than we want.
A learned metric (Discriminator)
What if we could replace the KL metric (which is rather dumb) with a learned metric? This is the idea of training a discriminator to tell the difference between and .
We optimize this using a binary cross entropy objective, which looks like
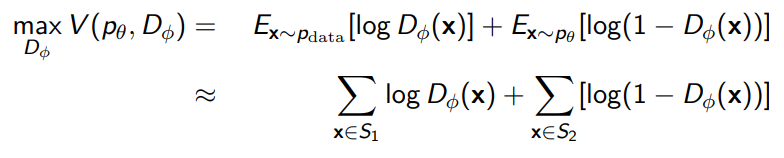
Now, this is tricky: an optimal discriminator satisfies
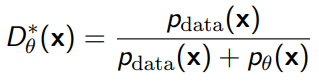
Proof (expansion of expectation)

If you take the inside of the integral to be , you’ll find that it only has one minimizer, and by calculus, you can derive that the minimizer is precisely .
An optimal discriminator does not achieve perfect accuracy, because if there is a nonzero density in both distributions for some point , it is ambiguous where the point came from.
Ultimately, this is a two-sample test objective to see if distributions are different.
A learned generator
You can learn a deterministic (potentially non-invertible) mapping between a low-dimensional and high dimensional data . This is just a feed-forward network that takes a sample from the prior and outputs the generated output.
The Min-Max Game
We can frame the GAN training as a min-max game, where we do

Theoretical Interpretation
If we reach the true after each inner loop, then you can see that the objective becomes the same as
Proof (simple algebra) ‘
Just substitute in and do some easy algebra to get the final result
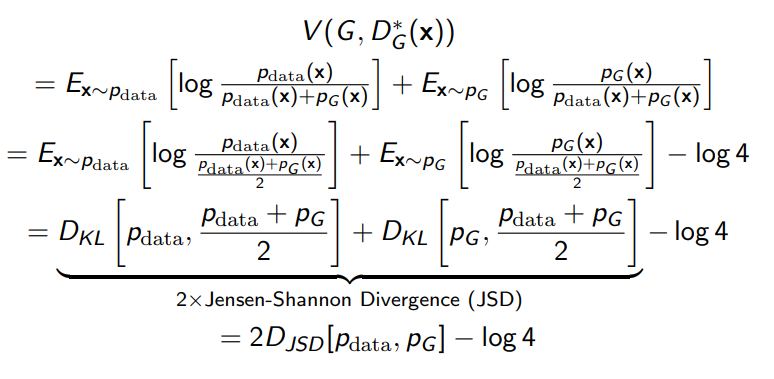
where JSD is a symmetric form of distribution divergence that is symmetric and has the properties of KL divergence

Namely, that iff , so we conclude that the optimal generator for the outer loop is .
In reality
Even though the GAN looks like it can converge on this outer loop objective directly, bear in mind that every time we compute , we have to recompute .
In practice, however, it would be impractical (or downright impossible) to compute the inner loop to convergence, much less compute it for every . Therefore, we do a sort of double optimization where we take the gradient WRT , and then WRT , and alternate. The gradients are easily computable:


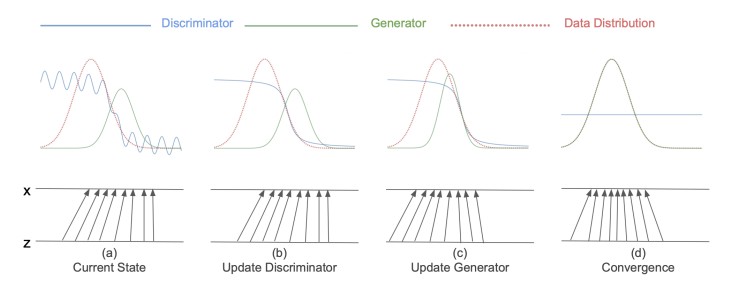
There’s a nice visualization of what the GAN does. It’s almost like a game of leapfrog
Visualization
f-GAN
So far, we’ve trained with KL objective and JS objective. With JS objective, we found a way to avoid evaluating the likelihoods of the data, making it easier to train. Can we find a general method for all f-divergences?
tl;dr the big objective is to minimize an f-divergence without calculating the densities (and using samples instead).
Yes! With a Fenchel conjugate. Because is convex and lower-continuous, we have .
And we can express this supremum as a function . This is unfortunate notation because the is also the Fenchel conjugate, but these are not related.
Now, this is also the function that reaches pointwise the highest for every , so we can replace it with , which is selecting a function from an infinite function class. We can narrow the function class, yielding a lower bound.
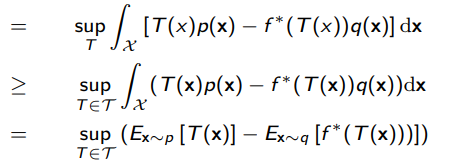
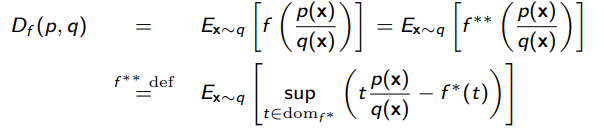
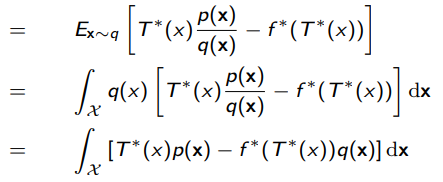
So we get a variational lower bound

And this is really interesting! The lower bound is the summation of two expectations and , which is some sort of function. Does this look familiar? It’s just a GAN objective hidden in plain sight!

To optimize, you need to maximize the inner objective () and then minimize the outer objective (which is the f-divergence)
Problems with f-divergences
If the don’t share the same support, we could run into issues. If , we might get a really high (or infinite) value, depending on how things are defined. There may be sharp discontinuities that hinder training. Can we make a smoother objective?
Wasserstein GAN
The Wasserstein distance
We define the Wasserstein distance, or the “earth mover” distance as

Intuitively, if you imagine the distribution as piles of dirt, this is the smaller amount of dirt you have to displace to turn into . The is the set of joint distribution with marginals of . The conditional model is the earth-moving model.
Of course, this is just intuition, and there’s a degree of formality that shows a similar thing. We can show that

where is the lipshitz-number of . Intuitively, we restrict the Wasserstein to classes of functions that don’t change very quickly.
Because we can write as this objective (known as the Kantorovich-Rubinstein duality), we can also optimize a Wasserstein GAN using this formula

where we enforce the lipshitz property of by clipping the weights or gradient penalty. Tl;dr if you clip the weights of a GAN or regularize the weights, you have made a rough approximation of a Wasserstein GAN.
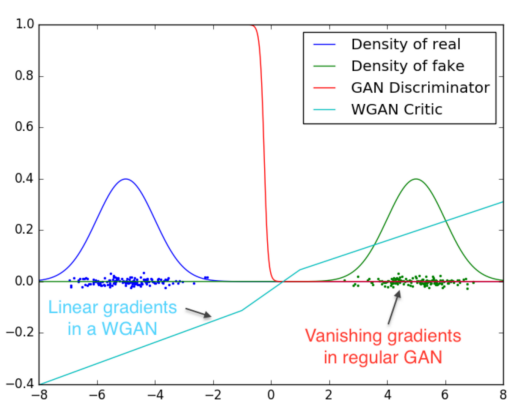
Demonstration of smoothness
A WGAN yields a much smoother transition boundary, which prevents vanishing gradients
Latent Representations in GANs
Unlike other models, the GAN does not have a mapping from .
- solution 1: Feed into the discriminator and use one of the layers as the feature representation. The con is that the discriminator may not be looking for very rich features and you may not get something good
- solution 2: can we co-train an encoder?
BiGAN
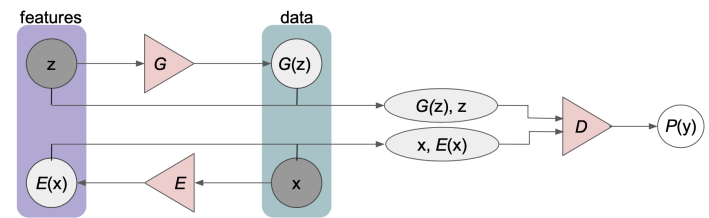
Previously, the discriminator is telling the difference between and . Now, we add an additional objective to tell the difference between and . This gets us a good encoder and decoder.
Domain transfer
We can use GANs to transfer between distributions, because we never restricted to be a simple distribution. We can have two very complex distributions, and the model translates between them.
We can start with paired examples and have the discriminator tell the difference between and .
You can also use unpaired examples, which requires a slightly more complicated structure (CycleGAN)
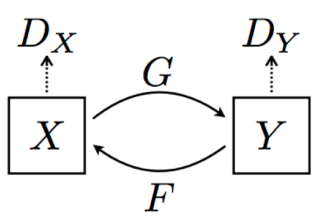
There are domain losses and cyclic consistency losses.
We may also preserve cyclic consistency using a cycle-consistent function to begin with, which is the idea behind AlignFlow.
Multiple domains
We can also make things more complicated by transferring between many domains. StarGAN accomplishes this through a central generator network and other objectives.
GAN problems
- Generator and discriminator losses can oscillate
- There is no robust stopping criteria (because there’s no global loss)
- There is no innate objective to prevent the generator to collapse its mode and always yield the same sample when queried. In fact, it happens pretty often on multimodal data.
https://github.com/soumith/ganhacks
https://github.com/hindupuravinash/the-gan-zoo