Energy Models
| Tags | CS 236 |
|---|
What’s wrong with existing paradigms?
Because we model probability distributions, we restrict model architectures to outputting distributions. Usually this takes the form of parameterizing a gaussian, which is OK, but it’s tricky. We had to jump through a ton of hoops to get things like VAE’s working.
Energy-Based Models (EBMs) have flexible model architectures and have stable training properties. However, these are tricky because the output of the EBM doesn’t sum to 1, which makes it an improper distribution.
Master summary
- EBM is a very straightforward thing to define
- Sampling is hard from EBM, so is computing the likelihood
- We can train through contrastive divergence, which requires model sampling
- Computing gradient (score) is easy, so we can train using score matching
- We can also use some tricks to train with noise contrastive estimation or adversarial optimization
Parameterizing Probability Distributions
If you have some function , you need to normalize it with a partition function to create .
Composing distributions
The product of normalized functions is also a distribution, so you can do something like . The parameters can depend on previous generations; that doesn’t change the validity.
The convex mixtures of normalized functions is also a distribution.
The tl;dr here is that we can compose functions together, allowing for complicated expressions that are still probabilities. This can be helpful if you can find functions whose partition functions are analytically computable, like the Exponential family. These functions are simple but composable.
Exponential Families
The exponential family are a family of functions whose partition functions can be analytically computed. These include Normal, Poisson, Exponential, Bernoulli, Beta, Gamma, Dirichlet, etc. These are nice, but they are not very expressive. Can we do better?
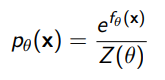
The Energy Based Model
We define the energy-based model as
This is helpful because the log-probability accesses the function directly, meaning that the gradients for the log probability are gradients of the function. Therefore the gradients will remain strong.
Pros and cons
Pros: this is very flexible— you can use any you want
Cons: if you don’t have the , you can’t sample, evaluate, or even extract features.
The only thing you can do with is take the ratio of probabilities, because the ratio removes the partition function.
However, even this ratio may be very useful for classification, abnormality detection, and denoising.
We can also take the product of these unnormalized models to create the intersections of the energy fields, i.e. if you had , you’d be selecting for something that has all three properties.
Restricted Boltzmann Machines
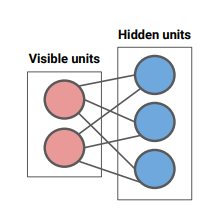
The RBM is a simple, older version of a generative model. There are visible and latent variables, both with binary values. We model the joint distribution as a second order function

Note how all the relationships are between the visible and the hidden; there are no relationships between the hidden units, or between the visible units.
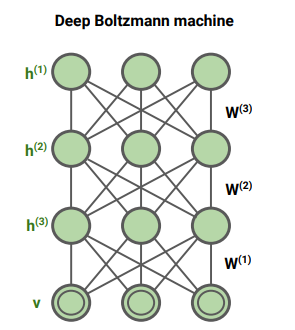
We can stack these on top of each other to create multiple layers of RBMs, which was a helpful pretraining objective for neural networks.
Training through Sampling
Our goal is to do maximum likelihood, i.e. . To do this ,we want to increase the numerator and decrease the denominator.
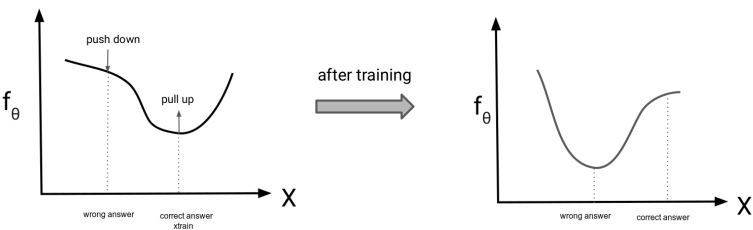
Notice that it isn’t sufficient to just maximize , because it may pull up other things too, and that would make larger. We want to selectively emphasize the seen data point, which means that we need to push down the wrong points too.
Constrastive Divergence Algorithm
We start from first principles, which is essentially the KL divergence / log-likelihood objective:

Using log rules, we get
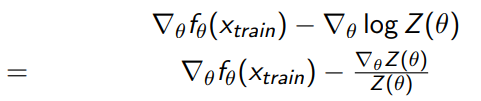
And using the definition of , we can get the following:
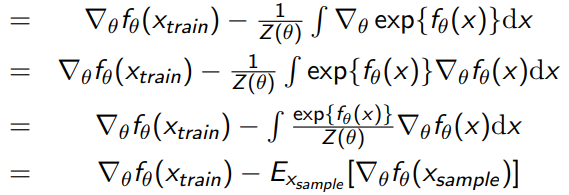
Note that the last step is because we recreated the model’s own distribution. We can estimate the expectation with Monte Carlo, which gets us the final objective of

So as long as we can sample from the model, we can improve it. We don’t have to compute the likelihood! And this is important because often, likelihood computation is worse than sampling.
Sampling
For sampling, we can avoid computing the partition function by using Markov Chain Monte Carlo (MCMC), which is a stochastic process that, when defined right, has a stationary distribution that is exactly the distribution of the energy function. This allows us to initialize the chain with a bunch of , let it mix, and then pull out the ’s that have been changed into the proper distribution.
Normal MCMC
Concretely, these are the steps:
- Initialize
- Let + noise.
- If , let (stationary, i.e. you’ve gotten worse)
- Else, let with probability (transition). If not, keep .
- Repeat steps 2 through 4 until we get stationary distribution
Note how 2, 3, 4 create a Markov Chain, with 3 and 4 representing two separate states that we transition to stochastically. This is how we sample, although it can take a long time to converge.
The theory states that we converge to because satisfies the detailed balance condition, which basically states that , i.e. the distribution is stable. There’s more on this in the 228 notes, so let’s leave it at this for now.
Langevin MCMC
Now, what if we can compute ? This seems like a logical next step, given that MCMC was basically doing noisy gradient ascent. Well, if you have the score function, you can compute the following algorithm:

where is a noise scheduler. Note that energy-based models have a very easily computed score function:
So if we do this, we can essentially recover an objective that is similar to diffusion models.

Why is sampling bad?
Sampling suffers from curse of dimensionality—it takes a long time to converge for higher dimensions. Now, this is a problem because the sampling-based training algorithms will therefore require a lot of computational power to work. Can we do better?
Training through Score Matching
Score function
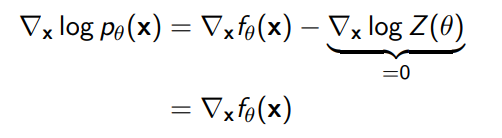
As we hinted before, it’s particularly easy to compute the gradient of the probability using an EBM because the partition function is agnostic to the value of .

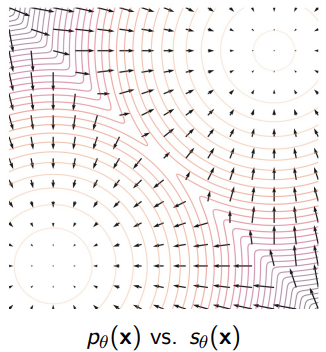
Example of score functions
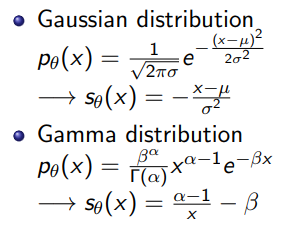
Score functions point to the place of highest density
Score Matching
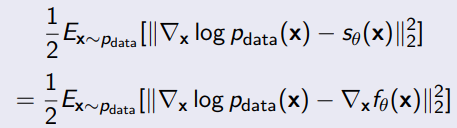
So this is an interesting situation. We can compute the gradient of but not itself. It turns out, the Fisher divergence between two distributions is defined in terms of the score function
Now, we could formulate the objective of training EBMs as minimizing the Fisher divergence between and . If we define , then
Now, this poses a pretty large problem: how do we compute ? Well, we can try expanding out the squared norm and then integrating by parts. The integration by parts shifts the gradient away from , which allows us to transform it into an expectation
Good example with a univariate case
We start by expanding out the objective
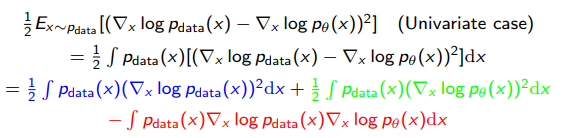
And we take the using the definition of the log

And finally, we apply integration by parts

(we assume that at infinites.)
Now, note how the blue term doesn’t depend on so we can essentaily push it into a constant. Therefore, we get this objective

Note how this is computable through samples from the dataset and gradients of the EBF (which are directly computable).
If we do this derivation out in the multivariate case (which requires the multivariate variant of integration by parts), we get
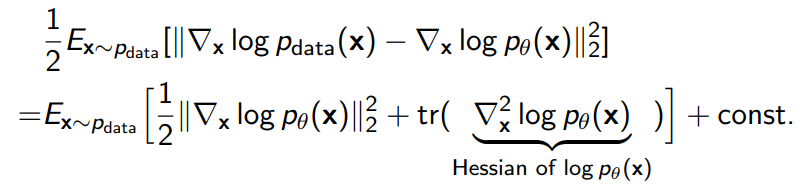
which we compute easily through Monte Carlo estimation and gradient of EBF
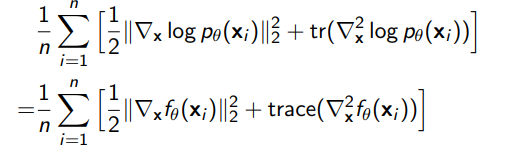
This works very well, but unfortunately the trace of the hessian is pretty expensive for large models. Therefore, we may want a slightly different score matching objective.
Note how KL divergence objective got us contrastive divergence, and Fisher divergence got us score matching
Noise Contrastive Estimation
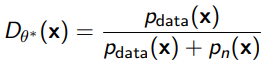
Here’s another way of optimizing an EBM: we assume that the correct distribution is different from noise, so you can contrast it from noise. How does this help us? Well, let’s try training a discriminator to tell the difference between data and noise

The optimal discriminator is
Ooh but this is interesting. So what if we parameterize the discriminator as the following?
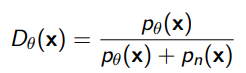
This assumes access to the noise type, which is pretty reasonable (because you’re injecting it)
Now in this case, if we have an optimal discriminator, we are implicitly learning
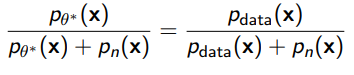
so . As another way of understanding this, we can rearrange to form

We can also interpret this formula as a “fix” or a “boost” to , so if you started from a poor generation model, you can make it better with a well-tuned discriminator.
Training Approach
The problem is that has a partition function, which may not be tractable
What if we just trained alongside? Well, we can rearrange the discrimnator as

Now, if we plug this formula into the training objective, we get

Concretely, this is all computable, so we can just optimize through samples from data and noise
Algorithm
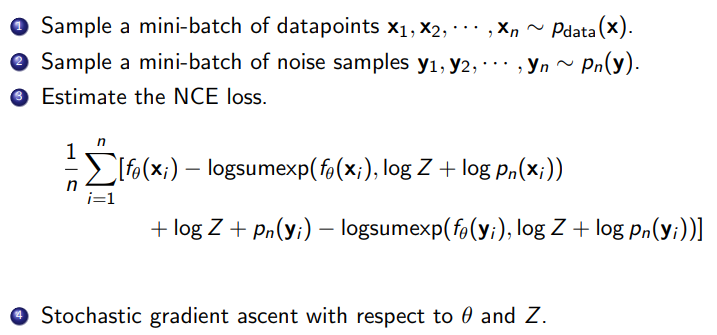
Again, there is no need to sample from EBM
Comparing and contrasting NCE, GAN
Both NCE and GAN are training a classifier and are likelihood free (the GAN avoids computing the likelihoods)
However, NCE doesn’t need adversarial training, which means that it’s more stable. NCE also requires full access (likelihood) to the noise, while the GAN only requires samples (from either distribution).
Ultimately, NCE trains an EBM while a GAN trains a deterministic sampler. The big pro is that we also get an estimation of the partition function, which enables us to reconstruct the true distribution .
Moving it back to contrastive (Flow contrastive estimation)
The observation is that we want to be as close to as possible to create a good discriminator. So, we can re-introduce the GAN objective! We can use a flow model to define , which creates the following adversarial example

Adversarial Paradigm / Variational Paradigm
If we have an EBM, we can create a Variational estimation for , which is easily optimizable
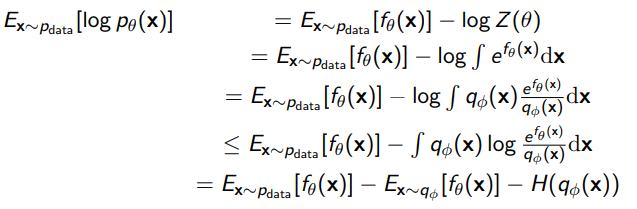
And the objective becomes

This needs to be a real distribution, but we can parameterize it (like a parameterized normal)
Good reference
https://arxiv.org/abs/2101.03288 How to Train Your Energy-Based Models