Equality Constraint Optimization
| Tags | Algorithms |
|---|
Equality-Constrained Minimization
This is when you want to solve the problem
where where the rank is , i.e. there’s probably fewer constraints than variables, meaning that there will be a non-zero space of potential solutions that satisfy .
From the discussion of KKT conditions, we established that we can solve this constrained problem by solving this alternative problem

Of course, this is impossible to solve directly. But we can start at the quadratic and go from there.
Quadratic Minimization
If our function is quadratic,

then the KKT condition can be expressed in the KKT Matrix
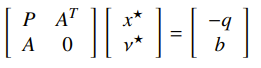
IF the matrix is nonsingular, there is a unique primal-dual pair. If the matrix is singular, then any solution is an optimal pair. If the system is not solvable, the problem is either unboudned or infeasible.
The matrix is nonsingular if and only if (PSD on nullspace of .)
Eliminating equality constraints
You can remove the equality constraints by expressing the set as where the range of is the nullspace of and is some solution of . This gives you the unconstrained problem of minimizing .
Once you have the solution , you can solve for

Solving through the dual
You could potentially solve the dual of the objective and then recover the primal by minimizing (because it satisfies strong duality). The dual is
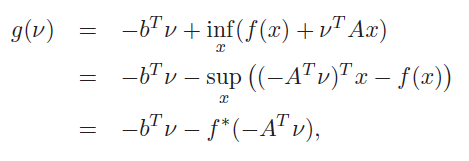
and this gives you an unconstrained problem.
Newton’s method with equality constraints
You can approximate any function as a quadratic with the hessian, which gets us the following KKT matrix

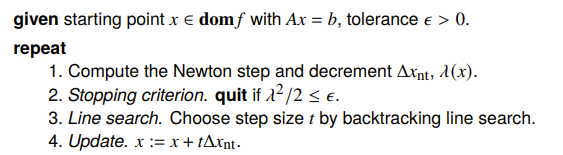
This newton step solves for the that minimizes the local quadratic, and you can take a step in this direction (or dampen it).
Newton decrement
We define the Newton Decrement for the equality constraint as

Note that this is slightly different from the definition in the unconstrained case. However, the function is still the same: estimates , and directional derivative in the newton direction.
The algorithm
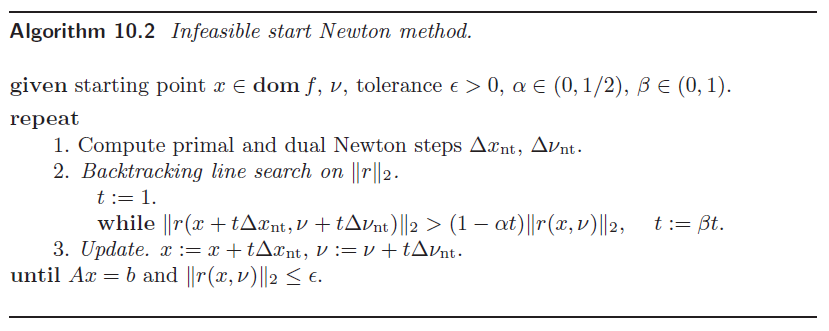
Infeasible start Newton method
Newton’s method described previously only works when we start at a feasible point. But what happens if we don’t?
The intuition is that we want to step towards being feasible and optimal.
Newton step at infeasible points
We have this objective from before

If we have some current (which may not be feasible), we want to take some step such that . How do we do this? Well, let’s substitute in into the constraint and use the first-order approximation

which gets the revised objective

Note how this is different from traditional Newton step, where we could just solve the linear equation. We had to take a slightly different route because of the infeasibility. Finally, this gives us the revised equation

Note that the isn’t the dual parameter; we’ll get to the dual interpretation in the next section
Interpretation as primal-dual step
Let’s define the primal-dual residual as

and we want to get things to zero. To do this, we make the tuple and set out to make some such that

If you write it out, you’ll get the equation

The algorithm
In practice, we use the primal-dual setup to solve for the primal and the dual variables.
Implementation
Solving KKT systems
Both types of constrained Newton methods require you to solve matrices like this
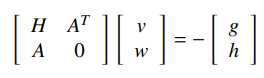
The LDL factorization is helpful here