Gaussian Processes
| Tags | Regressions |
|---|
The objective
Given a bunch of points, can I model it while being honest about uncertainty? (i.e. regression with uncertainty)
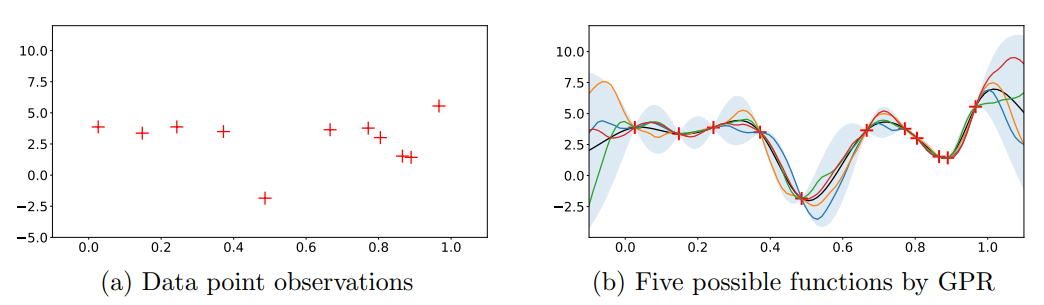
You may choose to sample along the distribution to make your inferences
The approach
Gaussian processes are inherently a bayesian view on regression. You start with a prior on what the function should look like, and then using the points, you compute a posterior on that distribution. But what does this look like?
Modeling the points (the prior)
We assume that the points are sampled from a multivariate distribution. The points is your data, and the is your query.
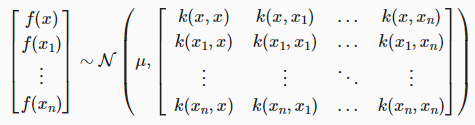
You eventually want to compute , but to do this, we need to know the joint distribution first. This is your prior.
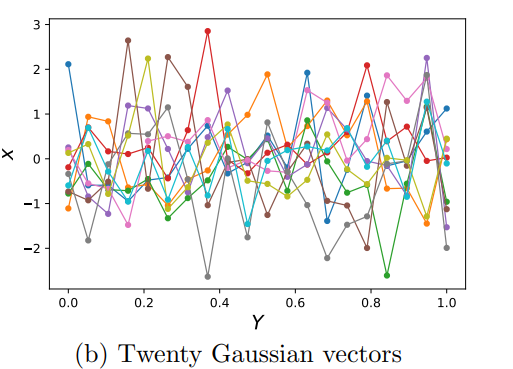
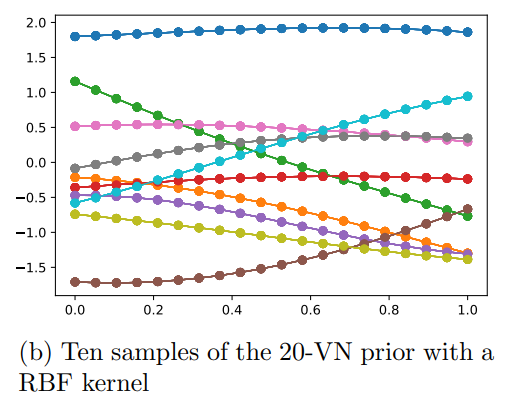
You can express the prior as a bunch of samples in point space. Depending on how strong the kernels are, you get different types of priors
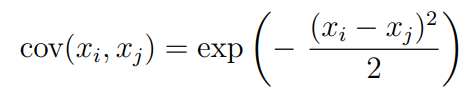
Covariance matrix and Kernel
The covariance matrix above tell us how much correlation some has with . The larger the , the more the correlation. Usually, we want closer to have closer correlation with . We achieve this through an RBF(radial basis function)
Making the Inference
So we now want to compute this . How do we do this?
Toy example
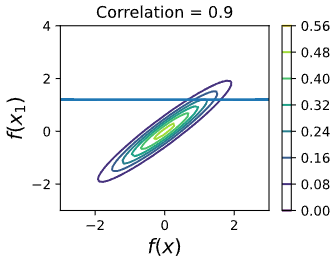
Let’s consider the case that we observe one point and want to compute . We start with a known two-dimensional distribution .
Well, there’s a visual meaning to this. Conditioning on a gaussian is the same as cutting a line through the graph and looking at the distribution that the line experiences.
The Technical Details
Let’s define the observations as
where is a data point.
Let’s say that we have an input vector and a query vector . The query vector is basically the points you want to predict
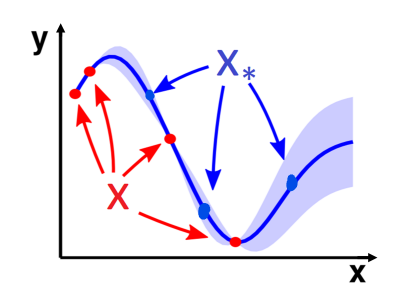
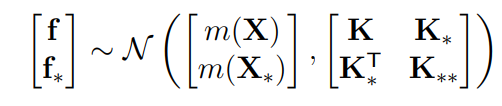
What does this actually mean in terms of our model? Well, let’s say that X is q-dimensional, and X_* is k-dimensional. We want to make an -variate model that respects our assignments to and gives a distribution across .
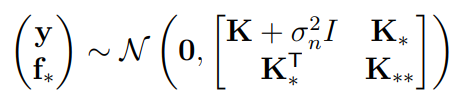
Using the power of block matrix representation, we can actually separate the outputs and write them in block form
Now, we are ready to condition! We actually know that the conditional of a gaussian is also a gaussian
Marginal and conditional gaussians facts (also in gaussian section)
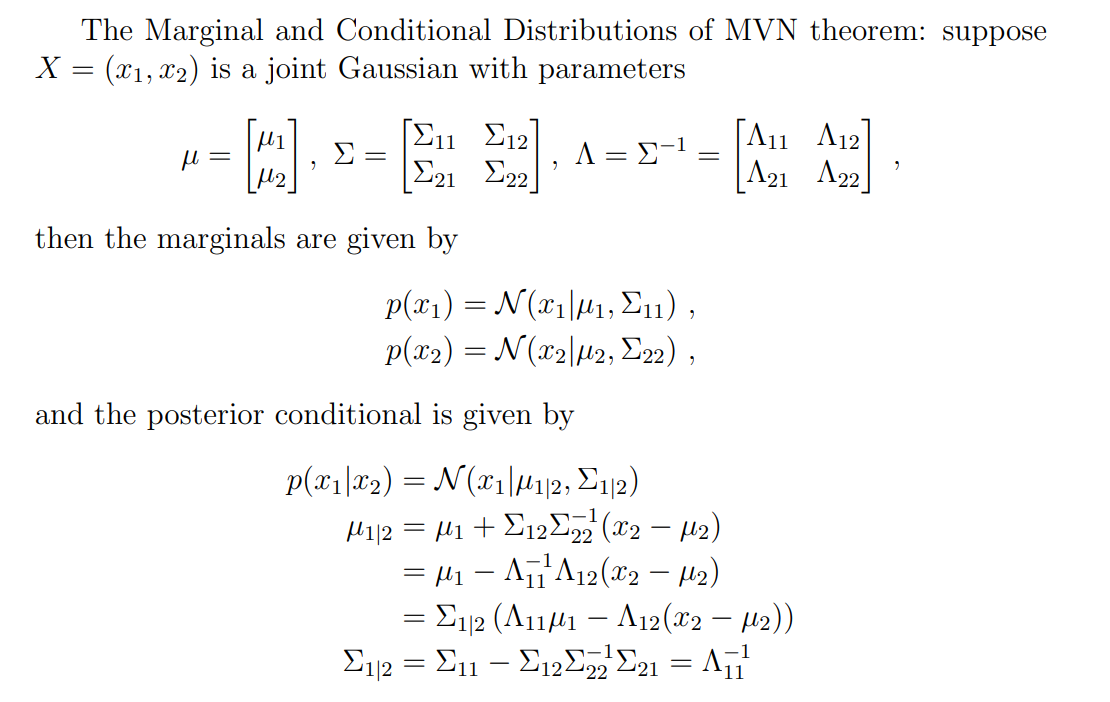
And we know (expand the thing above) that if we get a block matrix representation, we can get the conditional in closed form.

This creates the uncertainty distribution for inference time!
Adding Measurement noise
However, there is always measurement uncertainty, and you can quantify this by adding noise to the original matrix representation. Below, we let symbolically.
And the derivation stays the same (where you see , just add in the noise component)
Moving from one-dimensional regession
In our whole analysis, we only looked at one-dimensional regression. In reality, we can deal with multiple dimensions. Do you see how the kernel function takes in scalars? You can just as imagine a kernel function that maps from vectors to scalars, like an inner product. Then, you would have a matrix of points, with each column representing a data point. The kernel takes care of the rest.